地图数据采集技术
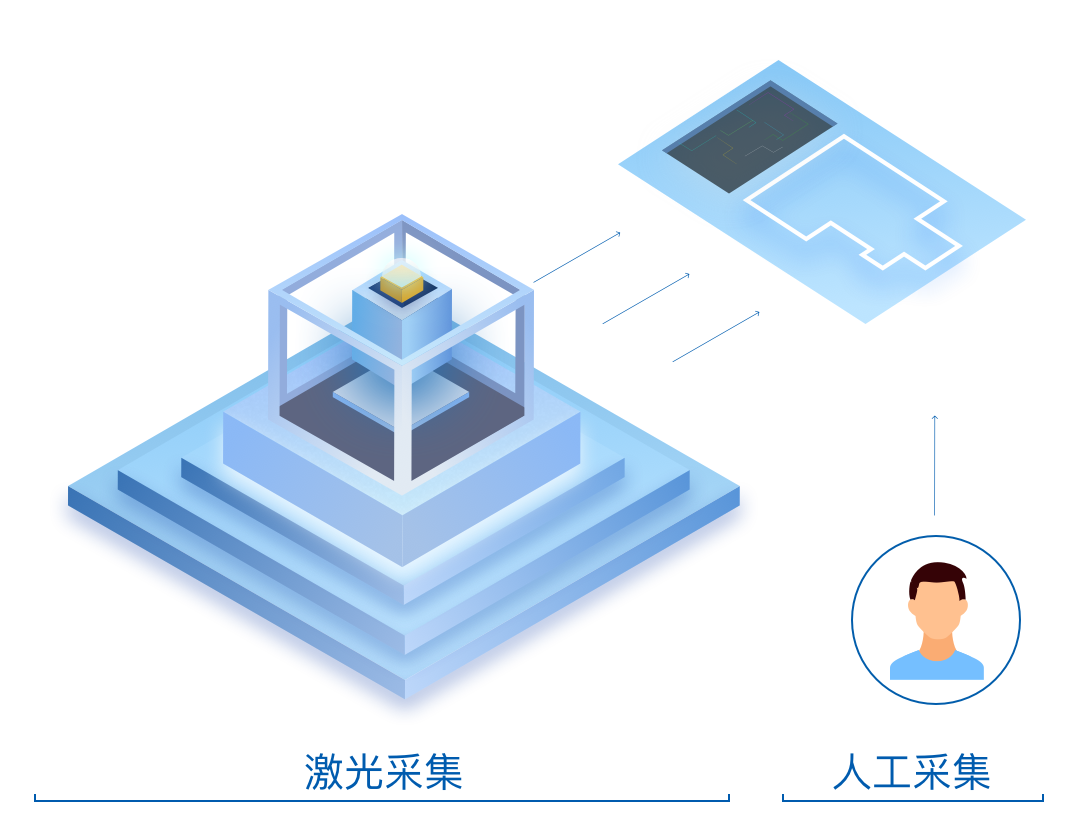
- 图聚采用先进的二维激光雷达扫描制作室内地图的方式,通过激光雷达的拟合点云数据作为室内地图的基础轮廓元素,并通过SLAM技术拼接形成可用的室内地图测绘素材。
- 激光雷达扫描技术所测得的室内地图精度误差小于5厘米,相比传统手工测绘精度误差平均可提升2倍以上的精度水平。
- 在采集速度上,激光雷达测绘方式完成后可缩短至2小时实现10,000平方米的测绘。相比传统测绘手段效率提升约5倍。
- SLAM算法可实现碎片式点阵图的拼接,后处理软件的算法也进行了优化手工处理调整,确保点阵图的完整拼接。
室内地图数据规格工艺
Indoor map data specification process
01

设备层
设备层帮助用户更好的进行固定资产管理,是室内地图的延伸
02

POI层(店铺公共设施)
POI层是室内位置服务的基础,包含一切用户需求
03
联通设施层
联通设施层是连接层与层、楼与楼的关键节点
04

路网层
路网层是定位导航的基础,让位置服务更加高效
05
楼层信息层
楼层信息给予建筑物延展属性,帮助用户获得建筑物全量信息
06
几何+建筑物外框
几何外框层准确的表达了建筑物及POI边界,帮助用户更好地理解空间结构
室内地图渲染技术
 3D地图渲染技术图聚第三代室内地图渲染引擎,对空间要素抽象与关联模型建立新的渲染逻辑,使得不同的POI展现出不同的立体形态,能使得地图渲染的效果高度仿真现场真实场景。
3D地图渲染技术图聚第三代室内地图渲染引擎,对空间要素抽象与关联模型建立新的渲染逻辑,使得不同的POI展现出不同的立体形态,能使得地图渲染的效果高度仿真现场真实场景。 个性化3D渲染技术第三代室内地图渲染引擎支持丰富扩展应用,可根据展会、办公、医疗、停车等不同场景进行个性化配色和地图展现,同时支持Logo的悬浮等。
个性化3D渲染技术第三代室内地图渲染引擎支持丰富扩展应用,可根据展会、办公、医疗、停车等不同场景进行个性化配色和地图展现,同时支持Logo的悬浮等。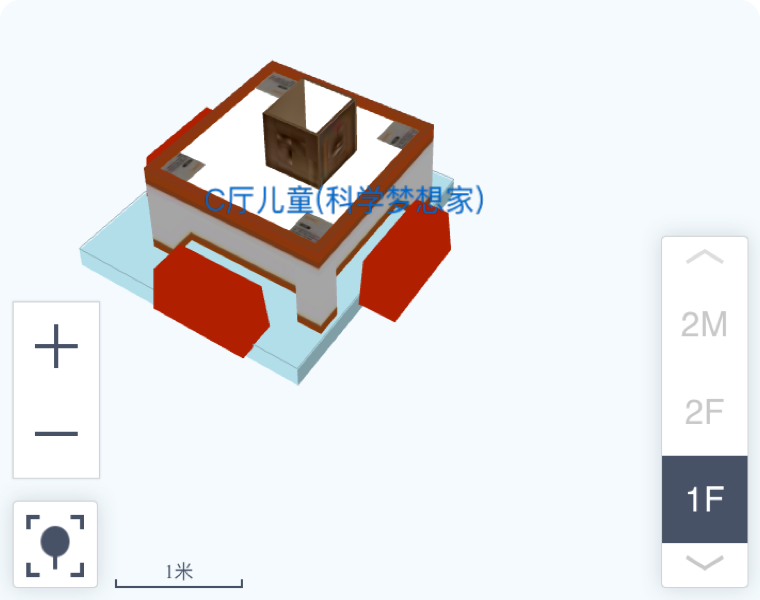 建模地图渲染技术第三代室内地图渲染技术支持将室内空间要素的空间模型同步渲染,对特定POI进行建模和贴图等美化处理,增加渲染的吻合度和美观度。
建模地图渲染技术第三代室内地图渲染技术支持将室内空间要素的空间模型同步渲染,对特定POI进行建模和贴图等美化处理,增加渲染的吻合度和美观度。 仿3D地图渲染技术第二代3D室内地图引擎可通过对2D地图的矢量化数据赋予空间高度及立面色彩形成3D渲染。
仿3D地图渲染技术第二代3D室内地图引擎可通过对2D地图的矢量化数据赋予空间高度及立面色彩形成3D渲染。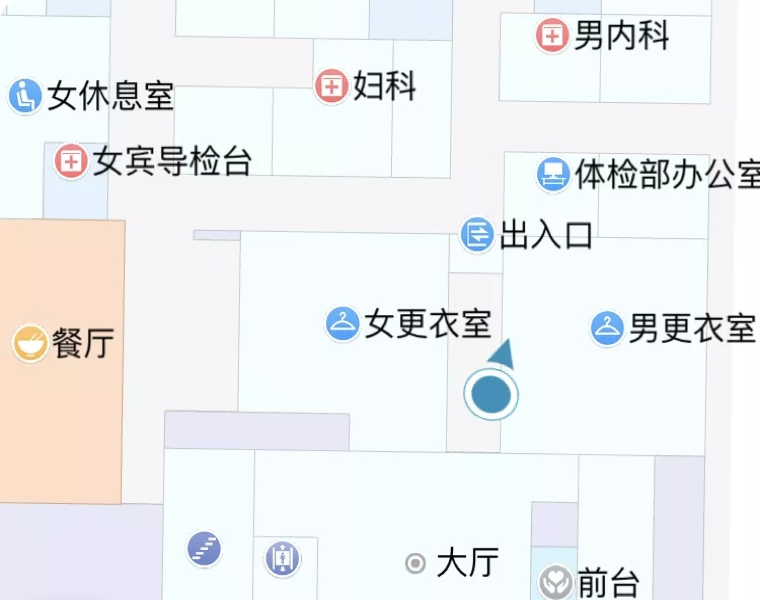 2D地图渲染技术图聚智能自主研发了第一代2D室内地图渲染技术,实现了室内地图数据从切片式到成矢量化的转变,采用顶点渲染的逻辑,完成了空间要素抽象和可视化。
2D地图渲染技术图聚智能自主研发了第一代2D室内地图渲染技术,实现了室内地图数据从切片式到成矢量化的转变,采用顶点渲染的逻辑,完成了空间要素抽象和可视化。